
Flight Controller Architecture in Modern Quadcopters
- Jan 30
- 3 min read
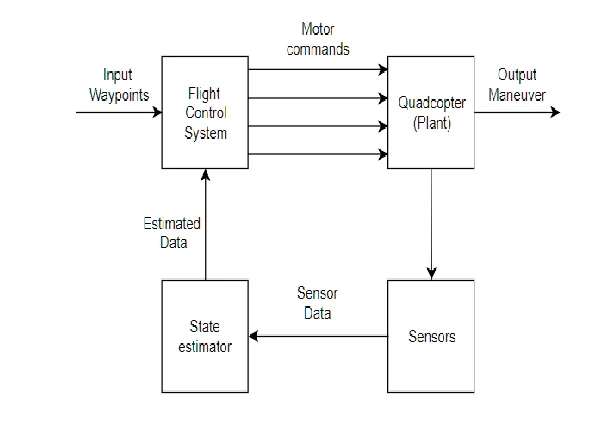
A Technical Article by Javiat Aerospace INTRODUCTION Modern quadcopters rely on highly integrated flight controller systems that act as the central nervous system of the UAV. The flight controller processes sensor data, calculates stabilization commands, and regulates motor outputs to maintain controlled flight.
Advances in embedded electronics, sensor fusion algorithms, and real-time processing have significantly improved the reliability and responsiveness of UAV platforms.
Understanding the architecture of a flight controller is essential for engineers, researchers, and institutions developing next-generation UAV systems. CORE COMPONENTS OF THE FLIGH CONTROLLER




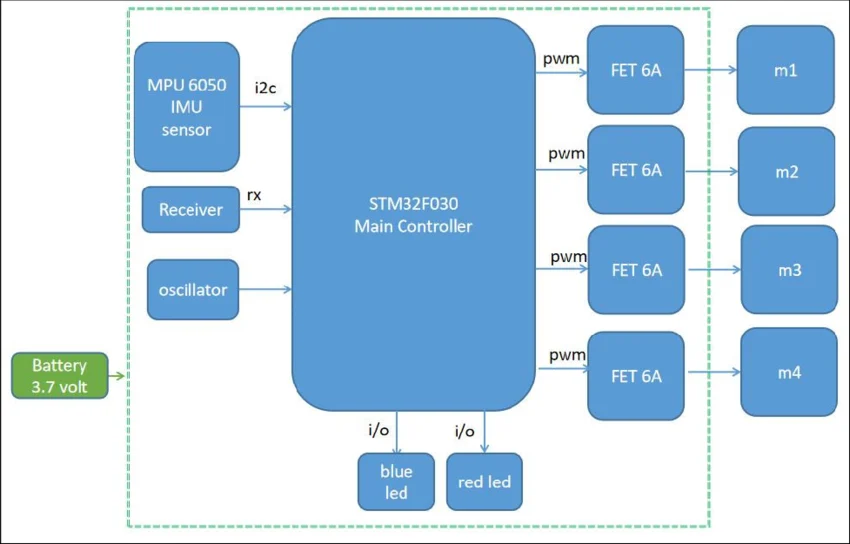
A modern quadcopter flight controller integrates several hardware modules that work together to maintain stable flight.
1. Microcontroller Unit (MCU)
The MCU is the computational core of the flight controller. It executes firmware instructions, processes sensor data, and performs real-time control calculations. Most modern controllers use ARM Cortex-based processors due to their high processing capability and low power consumption.
2. Inertial Measurement Unit (IMU)
The IMU consists of accelerometers and gyroscopes that measure angular velocity and linear acceleration. These measurements allow the flight controller to determine the drone’s orientation in three-dimensional space.
3. Barometer and Magnetometer
Additional sensors such as barometers measure altitude based on air pressure, while magnetometers provide heading information using Earth’s magnetic field.
4. Communication Interfaces
Flight controllers communicate with peripherals using protocols such as UART, I2C, SPI, and CAN. These interfaces allow integration with GPS modules, telemetry systems, and remote control receivers.
SENSOR FUSION AND STATE ESTIMATION

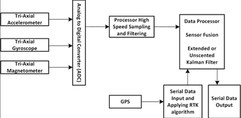





Sensor data from gyroscopes and accelerometers alone is insufficient for accurate orientation estimation due to noise and drift. Therefore, modern flight controllers implement sensor fusion algorithms.
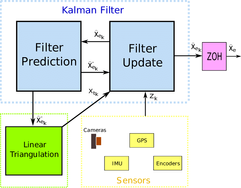
These algorithms combine data from multiple sensors to estimate the drone’s attitude and position. Common techniques include:
Complementary filters
Kalman filters
Extended Kalman filters (EKF)
By merging multiple sensor inputs, the system produces a stable estimate of roll, pitch, and yaw orientation. This estimation is critical for maintaining balance and accurate flight control.
FLIGHT STABILIZATION AND CONTROL ALGORITHMS
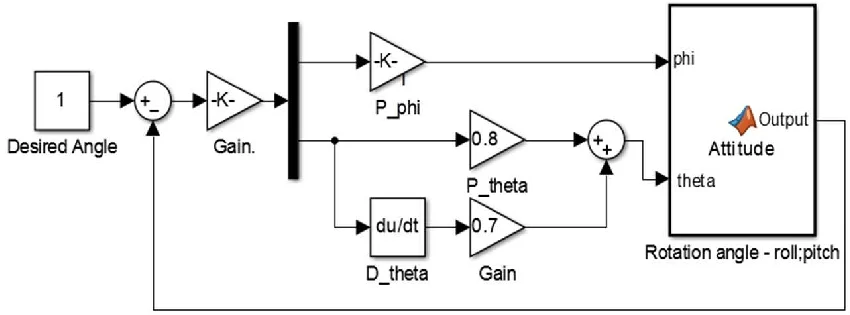
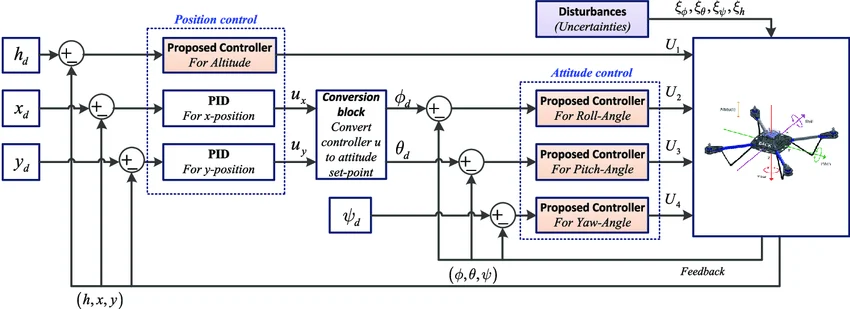

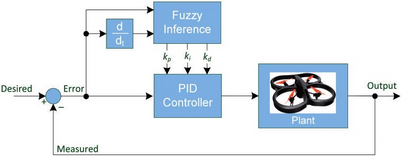
Once the flight controller estimates the drone's orientation, control algorithms are used to maintain stability. The most widely used control method is the PID controller.
A PID controller regulates system output using three components:
Proportional (P) – Responds to current error
Integral (I) – Corrects accumulated past error
Derivative (D) – Predicts future error trends
These parameters continuously adjust motor speeds to stabilize the drone during flight. Proper tuning of PID values is crucial for smooth maneuverability and responsive flight performance.
MOTOR MIXING AND ELECTRONIC SPEED CONTROL








Quadcopters use four motors arranged in an X or plus configuration. The flight controller calculates required thrust adjustments for each motor based on the control outputs.
For example:
Increasing thrust on one pair of motors changes pitch or roll.
Differential thrust between clockwise and counterclockwise motors produces yaw rotation.
These control signals are transmitted to Electronic Speed Controllers (ESCs) using PWM or digital protocols such as DShot. The ESCs then regulate motor speed accordingly. FIRMWARE AND SOFTWARE ARCHITECTURE Flight controllers operate using specialized firmware platforms such as Betaflight, ArduPilot, or PX4. These firmware systems provide:
Sensor calibration routines
Flight mode management
Navigation algorithms
Safety fail-safe mechanisms
Data logging and telemetry integration
The software architecture is typically layered, separating hardware drivers, control algorithms, and mission logic to maintain modularity and reliability. FUTURE TRENDS IN FLIGHT CONTROLLER DESIGN As UAV technology continues to evolve, flight controller architectures are becoming more sophisticated. Emerging developments include:
AI-assisted flight stabilization
Visual-inertial navigation systems
Edge computing for onboard decision-making
Redundant sensor architectures for enhanced reliability
Integration with autonomous swarm coordination systems
These innovations are expected to transform UAV capabilities and enable more complex autonomous operations across industries.
CONCLUSION
The flight controller remains the most critical component in a quadcopter system, coordinating sensors, algorithms, and propulsion control to maintain stable flight. Advances in sensor fusion, embedded processing, and real-time control algorithms have enabled modern UAVs to achieve remarkable precision and reliability. For institutions and engineers working in UAV development, a deep understanding of flight controller architecture provides the foundation for building more capable and intelligent aerial systems.






